
Udalekuek ekuatorea iragan dute dagoeneko eta geratzen diren azken saio hauetan robotika eta programazioari heltzeko ordua heldu da. Aurreko egunetan robot batek dituen alderdi desberdinen inguruan aritu ondoren (egiturak, zirkuitu elektrikoak eta egitura osatzen duten elementu desberdinen diseinua) gaur robotak muntatu eta martxan jartzeko ordua heldu da.
Gaurko saioaren helburu nagusia robotek duten mikrokontrolagailuaren funtzioaz jabetzea izan da. Horrela, talde handia bi talde txikiagoetan banatu ondoren, hauetako talde batek “garunik” gabeko bot txikiak muntatzeari ekin dio, besteak plaka elektroniko baten bitartez kontrolatzen diren robotekin aritu diren bitartean. Beti bezala, saioaren erdian, atseden txiki baten ondoren, talde biak gelaz aldatu dira eta horrela bi tailerretan muntatu dituzten gailuen artean dagoen desberdintasuna ulertzeko gai izan dira.
1) Bitxobot eta Pinpilibot
Bi “intsektubot” txiki hauek benetan guraso eta seme-alabak elkarrekin etxean muntatzeko oso aproposak dira. Oso material gutxi behar da bi kasuetan eta oso erraz muntatzen dira biak (estainadorearen beharrik ez dago!) Bitxobota hortzetako eskuila baten buruaren gainean lotzen zaizkion botoi pila bat eta mugikorrek dituzten bi bibragailuz osatutako bot txiki bat da. Zirkuitua isten denean, bibragailuek euren bibrazio mugimendua eskuilari transmititzen diote eta, honek, mugimendu horri esker, aurrera eta atzera egiteko ahalmena lortzen du.
Nola muntatzen den eta nola funtzionatzen duen ulertzeko egokiena azpiko bideoa ikustea duzue:
Pinpilibota bitxobotaren lehengusua da. Honek ez du mugitzeko ahalmenik baina zintzilikatuta dagoen harietatik tira egiten denean, hegan egiten du eta gainera begi biak pizten zaizkio. Pinpilibota eraikitzeko botoi-pila batetik abiatzen gara. Azpian bi LEDen hanka laburrak lotzen zaizkio eta gainean kuprezko hari bat, hau LEDen hanka luzeekin egindako eraztun bietatik pasatzen delarik. Eraztun hauek kuprezko haria ukitzen dutenean zirkuitua ixten da eta LED biak piztu egiten dira. Eraikuntza prozesua nolakoa den hobeto ulertzeko, azpian daukazue azalpen guztiak ematen duen dokumentua:
Azpian uzten dizuegu tailer honen fitxa:
2) Cannybots eta Renacuajobot
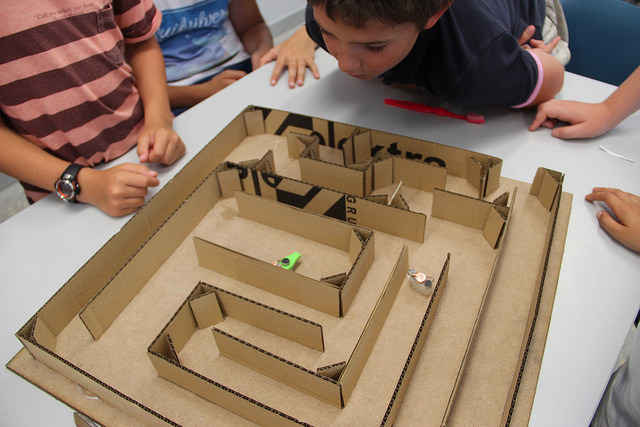
Bitxobotak labirintoaren barruan
Aurreko tailerreko bi bot txikiek mugitzeko eta argiak pizteko ahalmena badute ere, bata zein beste ekintza inongo kontrolik gabe burutzen dute. Alegia, bitxobota labirintotik irteteko ez dauka adimen berezirik: alde batetik bestera mugitzen da, ausaz, baina agindu zehatz bati erantzun gabe. Labirintotik irteteko atea aurkitzea logika baino, zorte kontua da.
Hortxe desberdintasun handiena bigarren tailer honetan haurrek muntatu dituzten robotekin. Erabili dituzten bi robot mota desberdiak “siguelineas” familikoak dira. Alegia, gai dira euren azpian marraztutako lerro beltza arazorik gabe jarraitzeko. Lerroak eskuinera biratzen duenean, robotak eskuinera egiten du eta lerroak zuzen aurrera egiten duenean robotak “badaki” aurrera egin behar duela. Hori dena hala gertatzen da bi robot desberdin hauek plaka elektroniko desberdin biren bitartez eta barruan instalatuta duten programa jakin batek bidaltzen dien agindu zehatzen ondorioz mugitzen direlako. Cannybotak BlueBrain izeneko plaka baten bitartez kontrolatzen dira eta Renacuajobota ZUM izena duen beste plaka baten bitartez.
Cannybotak zer diren eta nola funtzionatzen duten ulertzeko egokiena aurreko batean argitaratu genuen artikulu honi bistazo bat botatzea da. Bertan azaltzen da xehetasun guztiekin euren ezaugarriak. Renacuajoa Madrilgo bq etxeak sortutako robota da. Muntatzeko prozesu guztia sarean dokumentatuta dute eta lerroa jarraitzeko programa bitbloq izena duen gunetik jaitsi daiteke.
Azpian dituzue robotekin ateratako argazki batzuk:
-

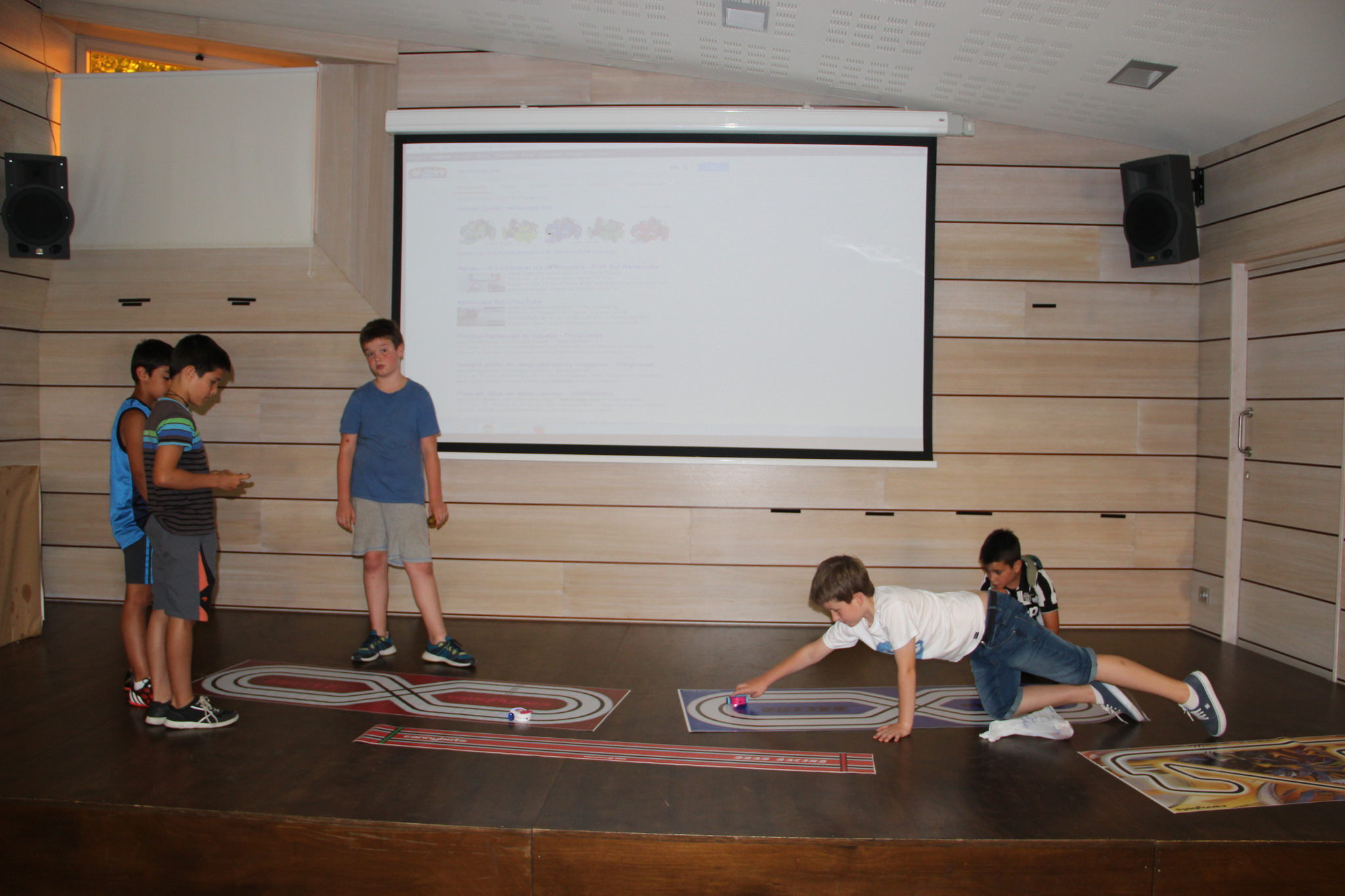
- Cannybotekin auto laisterketak egiten
-

- Cannybotak Montmeloko zirkuituan

-

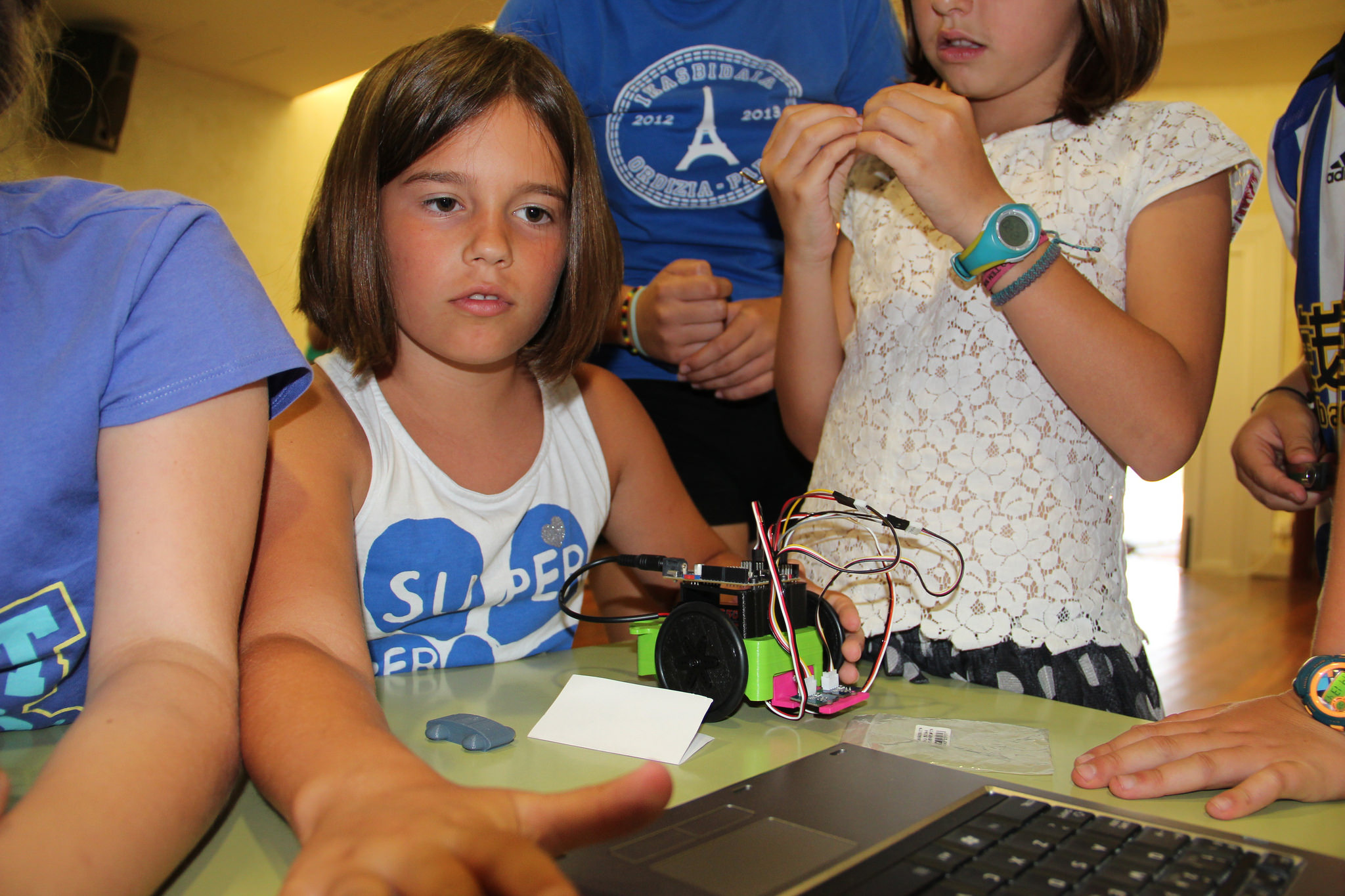
- Renacuajo robotari programa sartzeko prest
-

- Renacuajo robota muntatzen

Azpian daukazue orain arte ateratako argazki guztien bilduma. Gaurko saiokoak bildumaren amaiera aldean aurkituko dituzue:
Gaurkoan udalekuen ekuatorea pasa dugula kontutan hartuta, Mikel Etxarrik azken saioetan grabatutako bideoekin muntai dotore prestatu digu. Gustukoa izango duzuelakoan:
Iruzkin berriak